


RUBIK ROBOT
2004



     |
Rövid Videó a kirakásról

Bevezetés
Egy robot ami képes megoldani a 3x3-as Rubik kockát ® 2004-bõl!!!
2004 nyarán úgy határoztam, hogy nekilátok egy Rubik kockát kirakó robot megépítésének. Egy olyan robotot szerettem volna építeni, ami egy tetszõlegesen összekevert kockát emberi segítség nélkül kirak úgy, hogy a színeket is a robot ismeri fel.
A végleges változat 2005 õszén került bemutatásra.




A képen látható robot immáron a harmadik generációja a legelso elképzelésemnek.
Több átépítés után sokféle motortípust kipróbálva végülis egy ilyen elrendezés alakult ki.

Sok fejtörést okoztott a szerkezet kello precízitásának biztosítása.
A karokat alumínium ötvözetbol készítettem. A roboton 3 darab kar végzi a kocka forgatását, melyek 90 illetve 180 fokban elforgathatóak.
A satu muködéséhez hasonlóan fogják meg két oldalról a Rubik kockát. Ezzel a megoldással minden oldal elfordítható.




Szerkezeti egységek
Milyen alkatrészek összessége alkotja a robotot?
A motorok kötött van ötfázisú léptetomotor 3 db. a megfogáshoz ill. elengedéshez, valamint 3 db 180 fokos szögtartományban mozgó szervó motor.
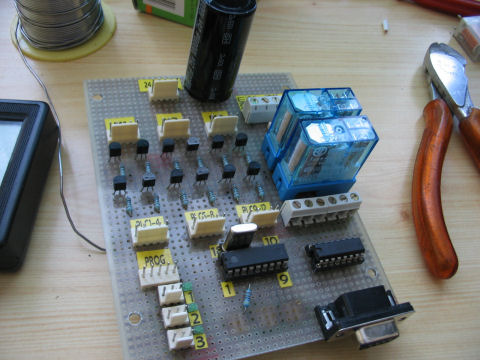
Egy Moeller PS4-es PLC (12 Input és 14 Output)
24v - 12v elektronika
PIC16F627 mikrokontroller
Szoftver, ami összefogja az egészet
A kocka
A boltban kapható Rubik kocka meglehetosen nehezen tekerheto, recseg-ropog, tehát nem az igazi. Nekem egy olyan kockára volt szükségem ami könnyen fordul. A rugók megrövídítése és a kocka pár napon át történo tágítása azonban meghozta a várt eredményt...

A színfelismerés, a kocka kirakása
Legyen a robot bárhol a környezet fényviszonyai minden helyen mások és mások.
Fontos tehát, hogy mindvégig azonos körülmények között vizsgálódjunk, különben ellentmondásos eredményeket kaphatunk.
Szükség volt tehát egy saját fényforrásra. A kamera elott egy fotózásban használt polárszurot helyeztem el, hogy a lámpa okozta csillogások megszunjenek.
A színfelismerés után legenerálódik egy Singmaster kód, majd Herbert módszerrel eloáll a kirakási sor (Myke Reid C implementációja)
Az esetek túlnyomó többségében ezek az algoritmusok átlagosan 60 - 80 oldalforgatással oldják meg a buvös kockát. Nekem ennél egy sokkal gyorsabb algoritmus kellett. A fennti algoritmus max. 22 lépésbol kirakja a kockát. Ez az algoritmus, lépéseket, és nem lépés-kombinációs sort generál.
A szoftver
A program, ami vezérli a robotot egy PC-n illetve a PLC-n fut. Delphi, Visualbasic, C, Asm nyelven íródott. A legtöbb fejtörést a robot karjainak mozgásának leprogramozása okozott, hiszen 43 milliárd féle képpen összekevert kocka létezik, ezekhez a program mindig a legrövidebb kirakási módszert állítja elo.


Egy átlagos kocka kirakása a robottal úgy 10-12 percig tart.
A Rubik Robot-ról részletesebben ebben a PDF-ben olvashatsz.
Boros Miklós, 2006
NÉZD MEG A VIDEÓT!
(itt balra lent)